 |
丒擔杮僼僅僲僌儔儉丂EW亅侾侽侽侽侾
丒俿俫俤丂俿俫俼俤俤
丒俰俷俤丂俽俙俵俹俴俤乮piano乯丄俼俙倄丂俛俼俷倂俶乮倐倎倱倱乯丄俽俫俤俴俴倄丂俵俙俶俶俤乮倓倰倳倣倱乯
丒侾俋俈俆擭侾侾寧俀俉擔丄儘僒儞僕僃儖僗偺儚乕僫乕丒僽儔僓乕僘丒僗僞僕僆偵偰榐壒丅僲僀儅儞俽倃亅俈係僇僢僞乕僿僢僪偵傛傞僟僀儗僋僩僇僢僥傿儞僌丅僺傾僲偵僲僀儅儞倀亅俉俈偑俀杮丄僪儔儉僗偵偼僔儏傾俽俵亅俆俇偑俁杮丄僜僯乕俁俉俙偲僙儞僴僂僓乕係俀侾偑奺侾杮丄僲僀儅儞倀亅俉俈偑俀杮丄偦偟偰儀乕僗偵偼僔儏傾俽俵亅俆俈偲僜僯乕俁俉俙偑奺侾杮巊梡偝傟偨儅儖僠儅僀僋榐壒丅
丒朻摢僺傾僲偺儁僟儖憖嶌壒偺惗乆偟偝偵僴僢偲偡傞丅偵巒傑偭偰慡曇偵搉傝壒偺慛搙偑慺惏傜偟偄丅僸僗傕側偔僲僀僘儕僟僋僔儑儞側偄偙偲摍偵傛傞壒偺慺捈偝偼丄傗偼傝偙偺曽幃偱側偗傟偽摼傜傟側偄傕偺偩丅
丒墘憈撪梕偼丄栜榑姼偊偰尵偆昁梫傕側偄柤庤俁恖偩丅揔搙側嬞挘姶偼偐偊偭偰椙偄曽岦偵摥偔偐丄偁傞偄偼偦傫側偙偲偼墘憈偡傞忋偵抲偄偰偼旝恛傕娭學側偄恖偨偪側偺偩傠偆丅僟僀僫儈僢僋偱丄恄宱偑峴偒撏偄偰偄偰丄幚偵偛婡寵丅乮丱丱乯
|
丒擔杮僼僅僲僌儔儉丂EW亅侾侽侽侽俀
丒俿俫俤丂俹俤俶俿俙俧俷俶
丒Clifford丂俰倧倰倓倎値乮俿倕値倧倰丂俽倎倶乯丄俠倕倓倎倰丂倂倎倢倲倧値乮俹倝倎値倧乯丄俽倎倣丂俰倧値倕倱乯乮俛倎倱倱乯丄俛倝倢倢倷丂俫倝倗倗倝値倱乮俢倰倳倣倱乯丄俼倎倷丂俵倎値倲倝倢倢倎乮俠倧値倗倎倱乯
丒侾俋俈俇擭俆寧侾俈擔丄僯儏乕儓乕僋偺儊僨傿傾丒僒僂儞僪丒僗僞僕僆偵偰榐壒丅
丒偙傟傕儅僀僋廫悢杮偵傛傞儅儖僠儅僀僋榐壒偱偁傞偑丄僟僀儗僋僩僇僢僥傿儞僌偩丅偑丄僟僀儗僋僩僇僢僥傿儞僌偲偼巚偊側偄傎偳壒偑惍偭偰偄傞丅偲尵偭偰偼岅暰偑偁傞偐丅
丒梫偡傞偵僟僀儗僋僩僇僢僥傿儞僌偵傛傞壒偺慛搙偼栜榑偺偙偲丄奺妝婍偺壒偺僶儔儞僗丄慡懱偺壒偺岤傒側偳傕幚偵偛婡寵側偺偩丅偙偺曈偼儅僀僋僙僢僥傿儞僌傗儈僉僔儞僌偑梋掱忋庤偔丄梫偡傞偵榐壒僄儞僕僯傾偺擻椡偑崅偄偲偄偆偙偲偐丅偙傟杮摉偵僟僀儗僋僩僇僢僥傿儞僌側偺偐丠偲巚偆傎偳丅
|
 |
 |
丒擔杮僼僅僲僌儔儉丂EW亅侾侽侽侽俁
丒側偒墹彈偺偨傔偺僷償傽乕僰
丒俴俙亅係乮僶僪丒僕儍儞僋丗傾儖僩僒僢僋僗丄僼儖乕僩丄儘乕儕儞僌丒傾儖儊僀僟丗僊僞乕丄儗僀丒僽儔僂儞丗儀乕僗丄僔僃儕乕丒儅儞丗僪儔儉僗乯
丒侾俋俈俇擭侾侽寧侾俆擔丄侾俇擔丄儘僗丒僄儞僕僃儖僗偺儚乕僫乕丒僽儔僓乕僗丒儗僐乕僨傿儞僌丒僗僞僕僆偵偰榐壒丅偙傟傕僪儔儉偵儅僀僋俇杮丄儀乕僗偵俀杮丄傾儖僩僒僢僋僗偵侾杮丄僼儖乕僩偵侾杮丄僊僞乕偵俀杮偺寁侾俀杮偺儅僀僋偑巊傢傟偨儅儖僠儅僀僋榐壒丅
丒僟僀儗僋僩僇僢僥傿儞僌偼柤庤偨偪偺墘憈偵尷傞丅側偒墹彈偺偨傔偺僷償傽乕僰丄屚傟梩側偳丄嬞挘姶偲桱偄偵枮偪偰幚偵慺惏傜偟偄丅
丒偑丄慜俀嶌偵斾傋傞偲慛搙偑偪偲棊偪傞傛偆側婥傕偡傞丅偺偼巊梡婡婍偵僄僐乕儅僔儞傗儕儈僢僞乕偑柧帵偝傟偰偄傞偑屘偺婥偺偣偄偐丅乮丱丱丟
|
丒俿俛俵丂PA俹亅俀侽侽俀俇
丒俵俙俼俬
丒拞杮儅儕
丒拞杮儅儕乮倴倧乯丄墶撪復師乮倗乯丄堫梩崙岝乮倐乯丄愇徏尦乮倓倱乯丄惣忦岶擵夘乮倲倱乯丄暁尒揘晇乮倲倫乯丄徏愇榓岹乮倴倝倐乯
丒侾俋俈俈擭係寧俋丏侾俁擔丄搶嫗僄僺僉儏儔僗僗僞僕僆偱偺榐壒丅
丒俿俛俵偱偁傞偐傜榐壒僄儞僕僯傾偼偍栺懇偺恄惉朏旻巵丅傛偭偰椺偺擛偔僆儞儅僀僋偺柧夝側壒偩偑丄拞杮儅儕偺儃乕僇儖偼堦枃儀乕儖傪旐偣偨傛偆側廮傜偐偄壒嶌傝偵側偭偰偄傞傛偆丅偩偑丄偦傟偱椙偄丅恖偺惡側偳帹尦偱挳偔傕偺偱偼側偄丅偟丄婥偩傞偔娒偄暤埻婥偑椙偔弌偰偄偰僼僃儘儌儞偽偭偪傝丅乮丱丱丟 |
 |
 |
丒俹俙俛俴俷丂俀俉俵俰俁俀侽俀
丒俠倰倎倸倷丂倎値倓丂俵倝倶倕倓丂Up
丒俽俙俼俙俫丂俛俙倀俧俫俙俶乮倁倧乯丄俼倧l倎値倓丂俫倎値値倎乮Piano乯丄俙値倓倷丂俽倝倣倫倠倝値倱乮俛倎倱倱乯丄俫倎倰倧倢倓丂俰倧値倕倱乮俢倰倳倣倱乯丄俰倧倕丂俹倎倱倱乮俧倳倝倲倎倰乯
丒侾俋俉俀擭俁寧侾丆俀擔僴儕僂僢僪偺俧倰倧倳倫嘩僗僞僕僆偱偺榐壒
丒摿偵僐儊儞僩側偟丅乮敋乯
丒偨偩丄偦偺墘憈偲壧偵悓偄偟傟傞丅乮丱丱丟
|
丒MAGNUM丂RECARD丂俙俹俼侽俁俀
丒俢俼俤俙俵俬俶俧
丒俙俵俙俵俢俙丂俵們俛俼俷俷俵
丒榐壒擭寧擔傕娷傔婰嵹偑側偄偺偱偄偮崰偳偙偱榐壒偝傟偨傕偺側偺偐椙偔暘偐傜側偄丅偑丄俰倁俠偺俲俀亅倃俼俠俢僥僋儘僲僕乕傪巊梡偟彫揝揙巵偑僇僢僥傿儞僌僄儞僕僯傾偲偁傞丅嵟嬤俴俹偱嵞敪偝傟偨傕偺偱丄偍偦傜偔僆儕僕僫儖偼俀侽擭埵偼慜偺傕偺偩傠偆偐丅
丒偖偭偲恈偺媗傑偭偨枾搙偺崅偄僴僀僼傽僀僒僂儞僪偼幚偵尰戙揑丅壒偺僋僆儕僥傿偑椙偄偺偱側偐側偐偵婥帩偪偑傛偄丅傾儅儞僟偺壧帉傪帨偟傓傛偆偵朼偄偱偄偔壧惡傕敩檹偲偟偰偄偰憉夣丅偩偑丄惡偼偦傟傎偳庒偔側偄姶偠側偺偱丄偦傫側偵庒偄偲偒偺嶌昳偱偼側偄偺偐傕丅
|
|
|
丒暷僔僃僼傿乕儖僪丂俴俙俛侾俁
丒俧倰倧倵倝値倗丂倳倫丂倝値丂俫倧倢倢倷倵倧倧倓丂俿倧倵値僌儘僂僀儞僌丒傾僢僾丒僀儞丒僴儕僂僢僪
丒倴倧丗傾儅儞僟丒儅僋僽儖乕儉丏俴丒儅儓乕僈巜婗僆乕働僗僩儔
丒侾俋俉侽擭俁寧俀俆擔偐傜俀俈擔丄俵俧俵亅僔僃僼傿乕儖僪丒儔儃丒僗僞僕僆偱偺榐壒丅
丒偄偔傜忋偑僴僀僼傽僀僒僂儞僪偲偄偭偰傕丄偙傟傪挳偔偲慡偔彑晧偵側傜側偄丅乮丱丱丟丂僔僃僼傿乕儖僪丒儔儃偺僟僀儗僋僩僇僢僥傿儞僌丅儗僐乕僪偺朻摢丄壒偑弌偨弖娫偵慛搙偺堘偄偑柧妋偩丅儅僋僽儖乕儉偺惡傕庒乆偟偔椡嫮偔怢傃傗偐偱崅壒偼摟柧偱揤傑偱撏偒偦偆偩丅壧傕幚偵忋庤偄丅慡曇慺惏傜偟偄惗乆偟偝丅
丒億僺儏儔乕壒妝偱偙傟偩偗壒偑椙偄偺偼側偐側偐側偄偩傠偆丅偑丄僟僀僫儈僢僋儗儞僕偑峀偄偺偱椙偄儗僐乕僪僾儗乕儎乕偑昁梫偩傠偆丅丂
|
丒暷僔僃僼傿乕儖僪丂俴俙俛侾俆
丒僂僃僗僩丒僆僽丒僆僘
丒傾儅儞僟丒儅僋僽儖乕儉丄儕儞僇乕儞丒儅儓乕僈
丒侾俋俉侾擭係寧俀係擔乣俀俉擔僟僀儗僋僩丒僇僢僥傿儞僌丅俴俙俛亅侾俁偲傎傏摨偠儊儞僶乕偱偺榐壒丅擖傝岥偐傜弌岥傑偱帺嶌娗媴幃傜偟偄丅
丒傆乣傓丅偙傟傕僟僀僫儈僢僋儗儞僕偑峀偔忋偲摨條偺慺惏傜偟偝側偺偩偑丄惗乆偟偝偲偄偆揰偱偼俴俙俛侾俁偺曽偑忋偐丅壗屘側傜偙偪傜偼俀枃忋偺乬俢俼俤俙俵俬俶俧乭偺傛偆側僴僀僼傽僀僒僂儞僪揑側姶偠傪庴偗傞応崌偑偁傞偟丄傾儅儞僟偺惡傕乬俢俼俤俙俵俬俶俧乭偵偍偗傞惡偵嬤偄傛偆側婥偑偡傞偐傜丅梫偡傞偵偪傚偭偲恖岺揑側偺偩丅壗屘偩傠偆丅僄僐乕儅僔儞偱傕壛偊傜傟偨偺偩傠偆偐丅晄柧丅乮丱丱丟丂偲偼尵偊丄偙傟傕暲偱偼側偄丅挻桪廏榐壒斦丅
|
|
 |
丒儐僯僶乕僒儖丂價僋僞乕丂俵倁俰俰亅侾
丒倄倧倳丂俙倰倕丂俽倧丂俛倕倎倳倲倝倖倳倢
丒栘廧栰壚巕乮倫乯丄屆栰岝徍乮倐乯丄埨僇愳戝庽乮倐乯丄巗尨峃乮倓倱乯丄娾悾棫旘乮倓倱乯
丒侾俋俋俉擭侾俀寧侾俇丆侾俈丄侾俉擔搶嫗俰倁俠惵嶳僗僞僕僆偱偺丄僗僠儏乕僟乕俙亅俉侽夵憿僶乕僕儑儞偵傛傞傾僫儘僌侾僀儞僠俀僩儔僢僋儅僗僞乕儗僐乕僟乕偵傛傞榐壒丅儅僗僞儕儞僌僄儞僕僯傾偼彫揝揙巵丅
丒偆乣傫丅旤宍偵偼庛偄丅乮敋乯丂偙偺幨恀丄俴俹偺戝偒側僕儍働僢僩偱尒傞偲側偍椙偄偱偡側偀丅乮丱丱丟丂仼丂(--)傾儂
丒偙偆偄偆恖偑偽傝偽傝傇傝傇傝偲椡嫮偔僺傾僲傪抏偔偺偩偐傜嬃偄偰偟傑偆丅栜榑偽傝偽傝傇傝傇傝偱偁傞堦曽慇嵶偱偲偭偰傕忣姶朙偐丅弌棃忋偑傝偺僒僂儞僪偼栜榑僴僀僼傽僀宯偩偑丄惔椓姶堨傟傞慺惏傜偟偄墘憈偩丅偱丄俠俢傛傝俴俹偺曽偑慛搙偑崅偔偰懷堟傕僟僀僫儈僢僋儗儞僕傕峀偔偰偢偭偲椙偄丅偺偼俠俢僾儗乕儎乕偑偟傚傏偄偣偄偐丅乮丱丱丟 |
 偦偺偆偪偱傕嵟屆偱丄尦慶偐偮悽奅嵟弶偺俢俢儌乕僞乕偱偁傞俽俹亅侾侽梡偺俢俢儌乕僞乕偑悑偵傗偭偰偒偨偺偩丅乮丱丱乯丂
偦偺偆偪偱傕嵟屆偱丄尦慶偐偮悽奅嵟弶偺俢俢儌乕僞乕偱偁傞俽俹亅侾侽梡偺俢俢儌乕僞乕偑悑偵傗偭偰偒偨偺偩丅乮丱丱乯丂








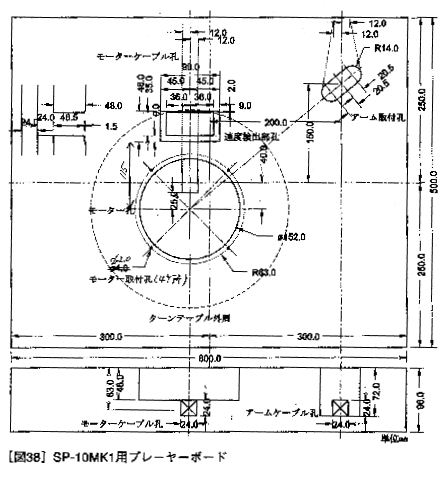
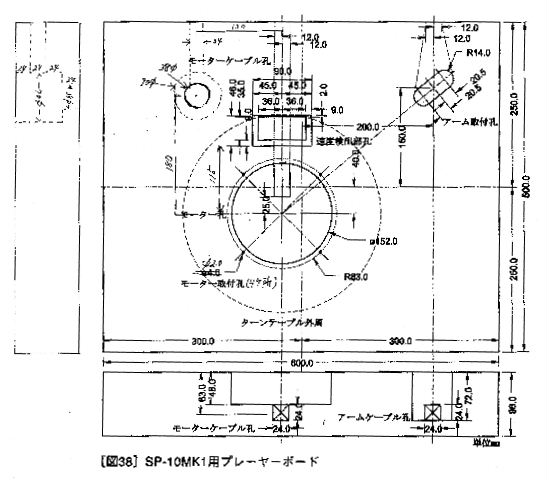







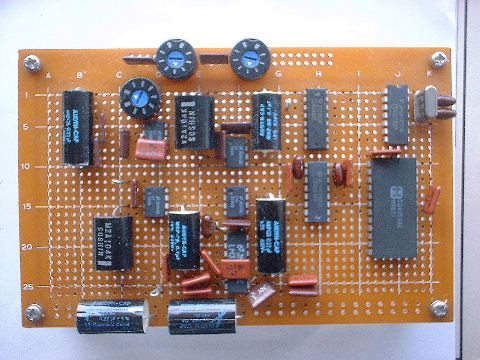
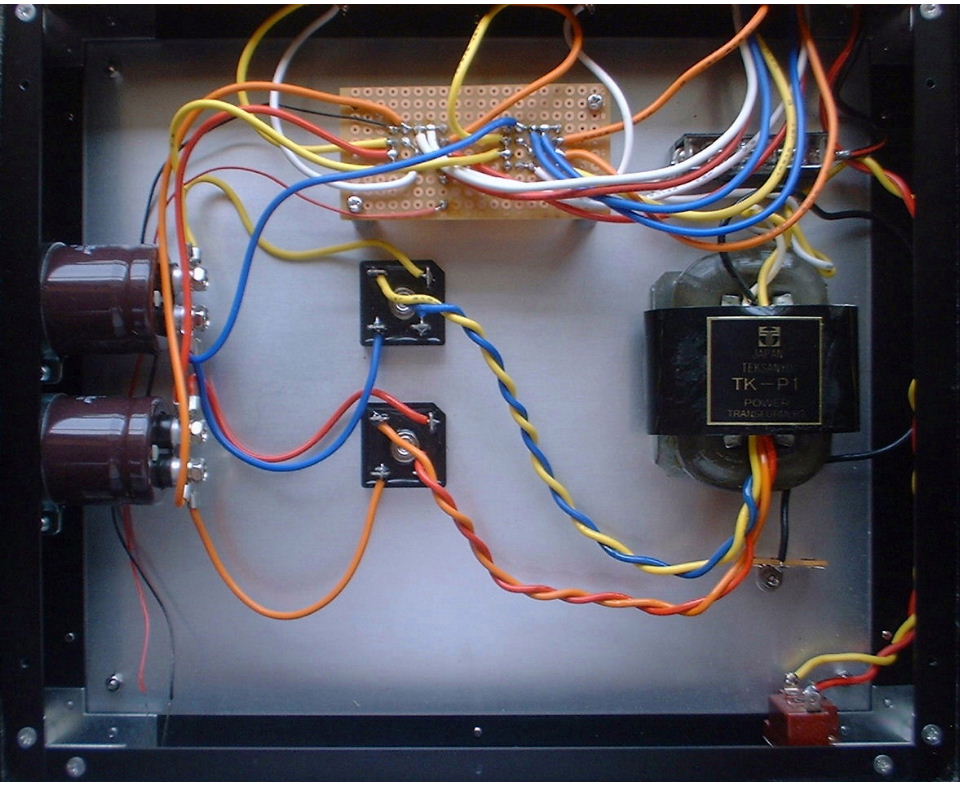
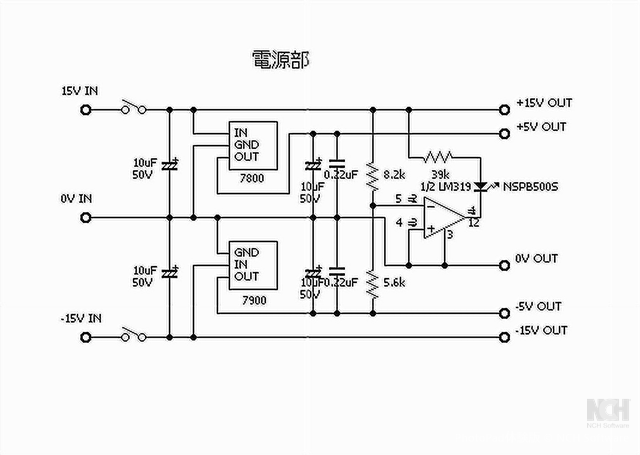
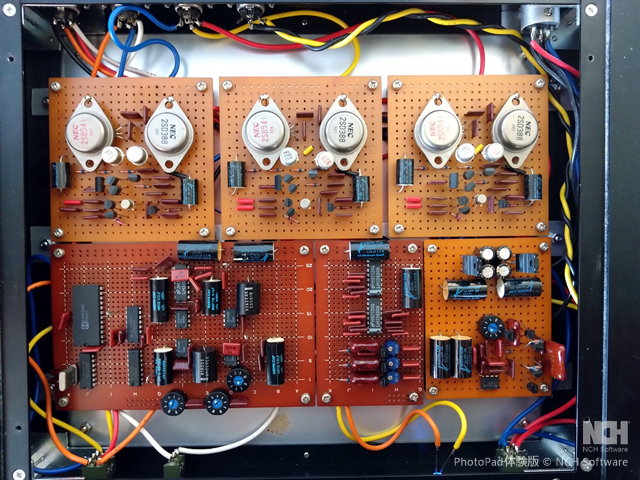
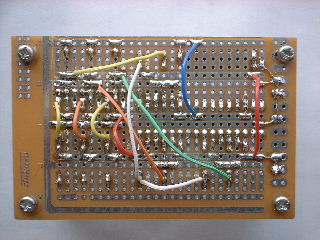
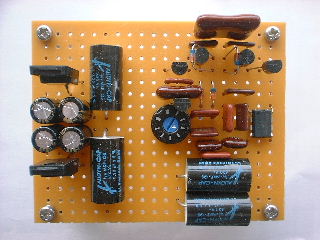
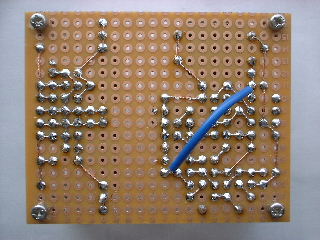
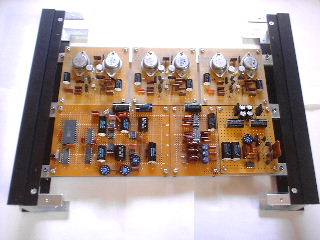
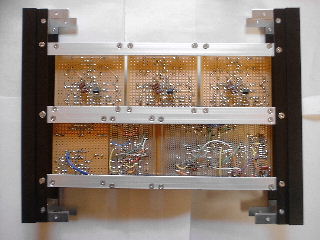
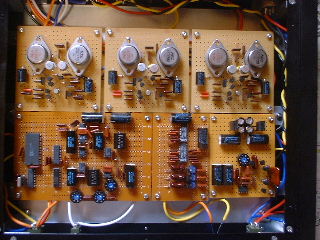
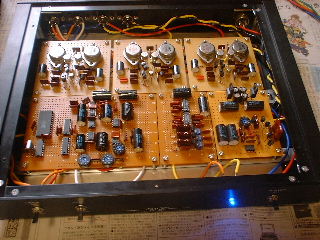
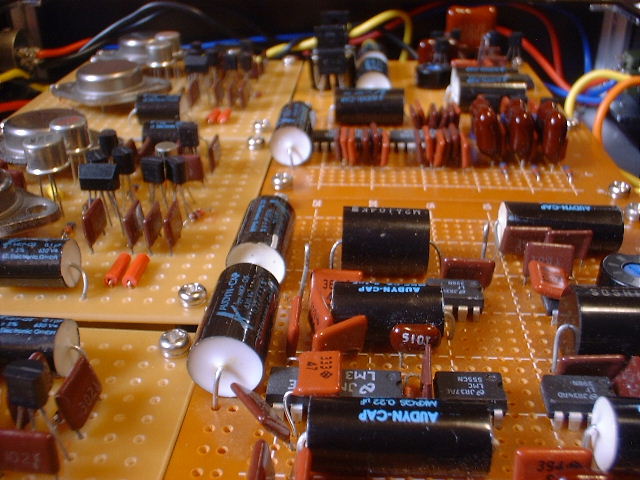
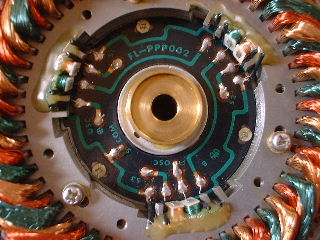
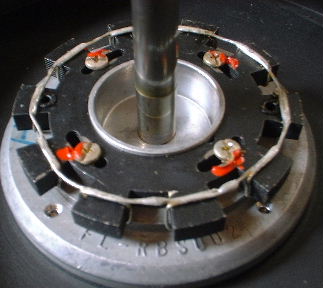
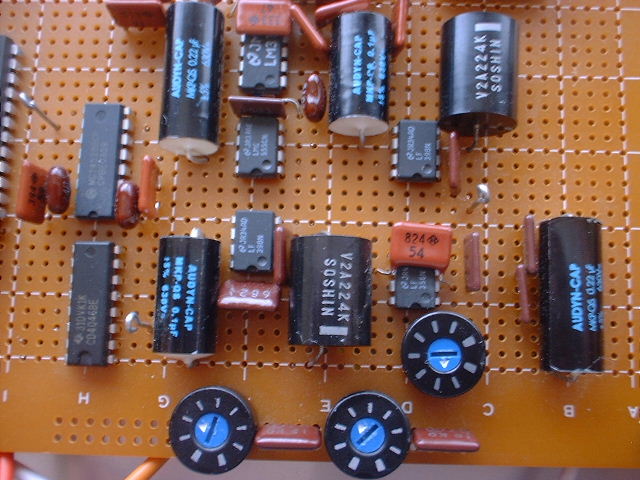
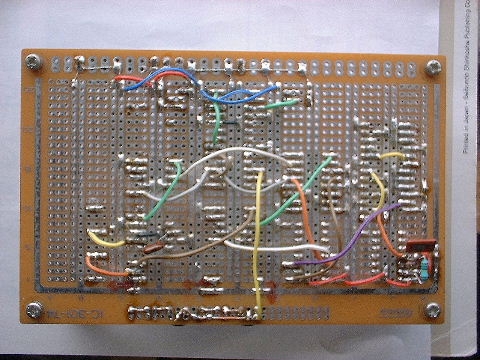 晹昳偺婎斦攝抲傕婎杮揑偵僆儕僕僫儖偲摨條偱偁傞丅棤懁攝慄傕丄俶倧亅侾俈俋偺婎斦攝抲恾傪嶲徠偟偰嶌傞丅偑丄偙偺棤懁偺攝慄恾偼偐側傝娫堘偄偩傜偗側偺偱丄掶惓偟偨夞楬恾傪尦偵丄奺俬俠偺僺儞攝抲傪妋偐傔側偑傜丄堦偮堦偮帺暘偱妋偐傔偰攝慄傪峴傢側偗傟偽俶倧亅侾俈俋傪傕偺偵偡傞偙偲偼側偐側偐偵崲擄丅
晹昳偺婎斦攝抲傕婎杮揑偵僆儕僕僫儖偲摨條偱偁傞丅棤懁攝慄傕丄俶倧亅侾俈俋偺婎斦攝抲恾傪嶲徠偟偰嶌傞丅偑丄偙偺棤懁偺攝慄恾偼偐側傝娫堘偄偩傜偗側偺偱丄掶惓偟偨夞楬恾傪尦偵丄奺俬俠偺僺儞攝抲傪妋偐傔側偑傜丄堦偮堦偮帺暘偱妋偐傔偰攝慄傪峴傢側偗傟偽俶倧亅侾俈俋傪傕偺偵偡傞偙偲偼側偐側偐偵崲擄丅 師偵丄埵抲専弌婍偲僎僀儞僐儞僩儘乕儖傾儞僾丅
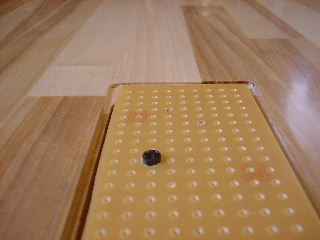
師偵丄埵抲専弌婍偲僎僀儞僐儞僩儘乕儖傾儞僾丅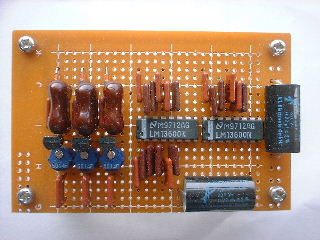







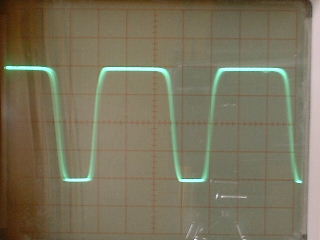
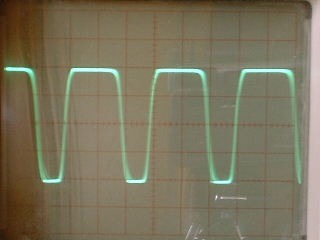
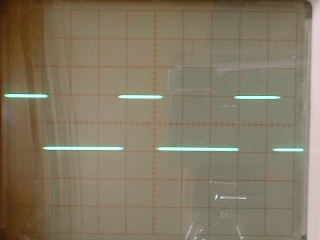
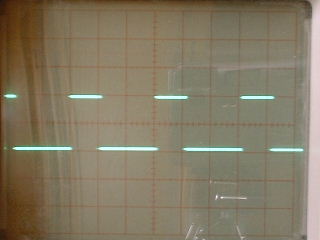
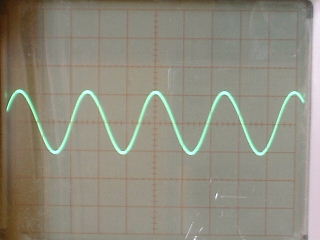
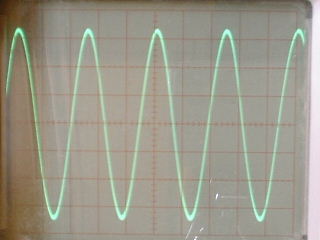
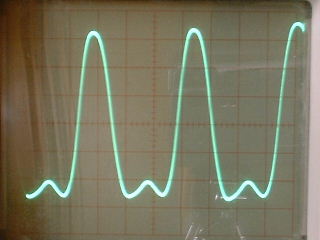
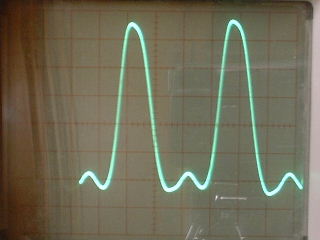
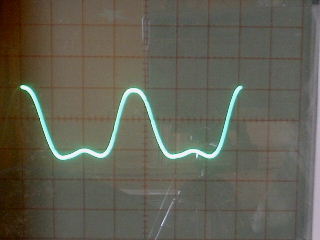
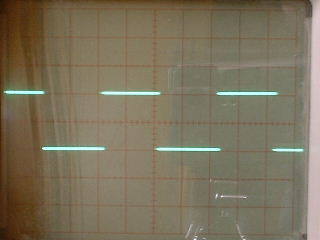

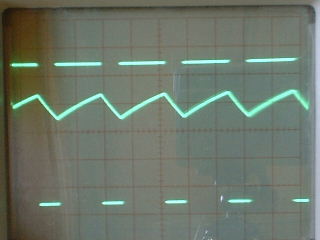
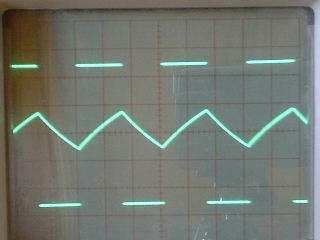
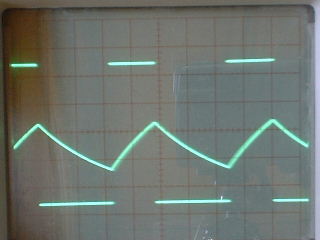
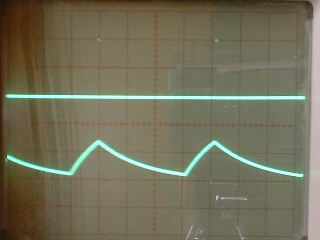
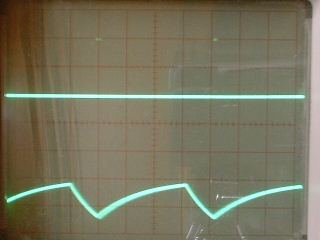
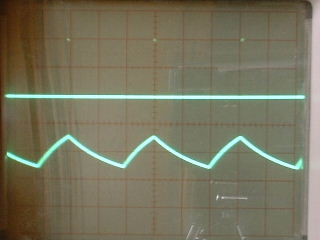

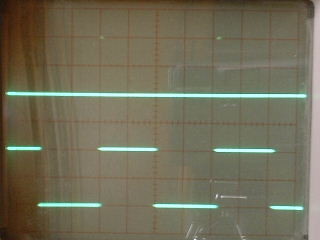
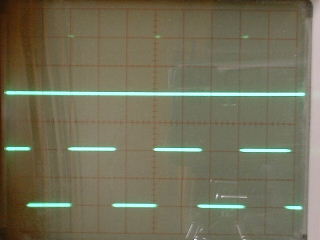
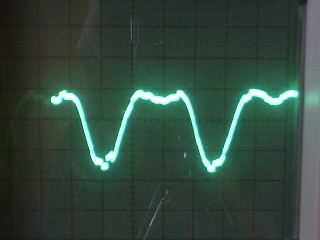
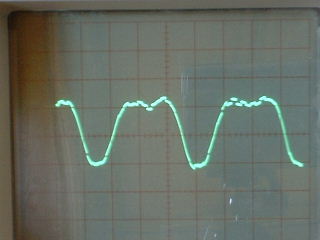
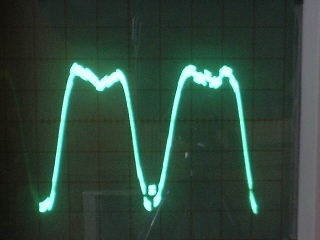
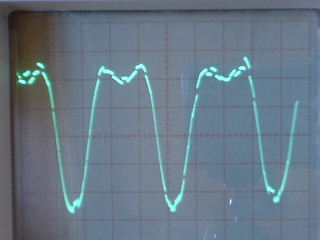

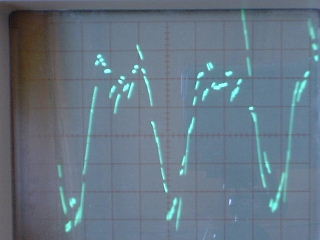
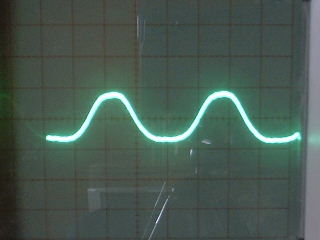
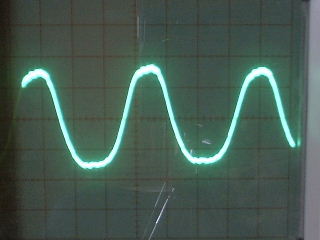
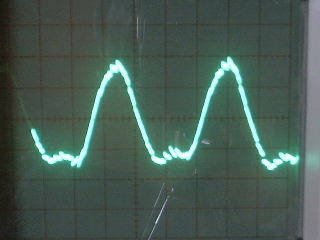





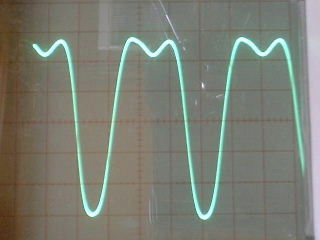
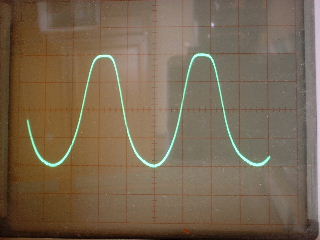
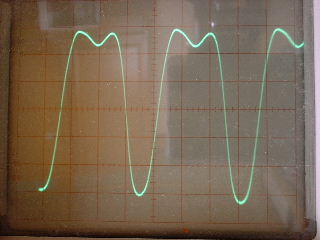
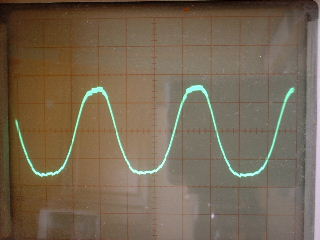
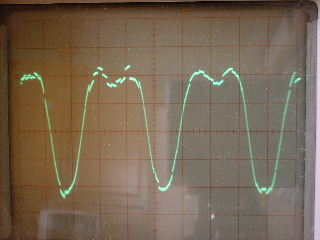
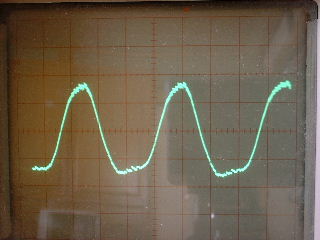
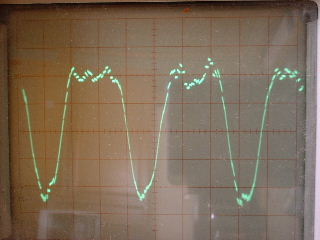
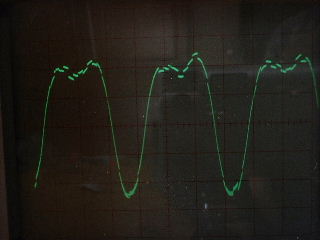
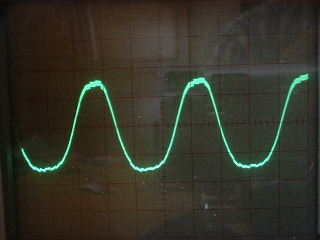
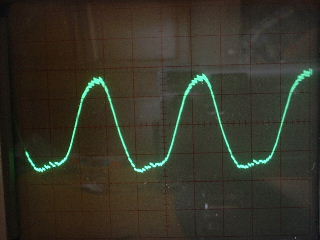
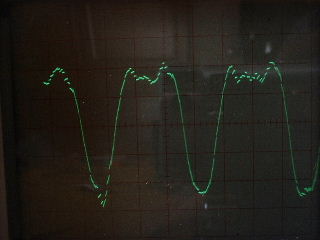
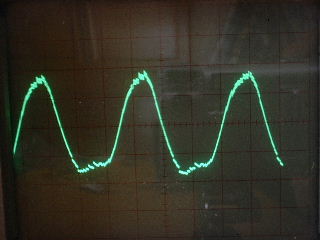
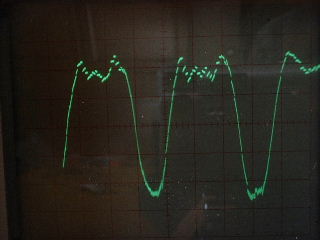
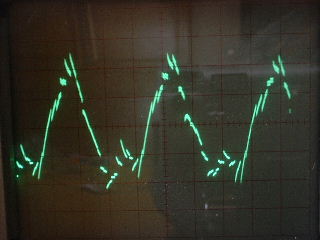
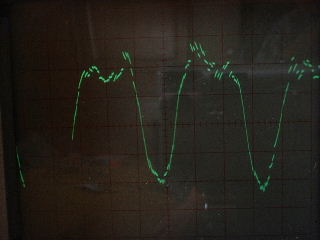
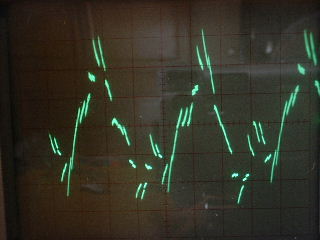
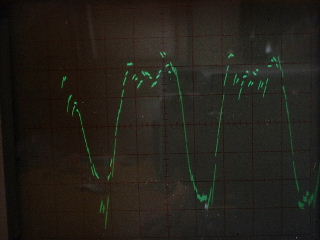
 偱丄寢壥偼壓偺傛偆偵側傞丅偺偼梊憐捠傝偩偑乮丱丱丟丄椢偑俀俈倠兌丄愒偑俆俇倠兌丄惵偑侾侽侽倠兌丄墿怓偑俀係侽倠兌偺応崌丅帪掕悢偑彫偝偄掱偵怳暆傕戝偒偔側傝丄嶰妏攇偺僺乕僋抣傕崅偔側傞偙偲偑暘偐傞偑丄嶰妏攇偺扟偼媡偵彫偝偔側傞丅偙偲偵偮偄偰偼慜夞拲帇偟偨晹暘偩偑丄崱夞拲帇偡傋偒偼嶰妏攇偺棫偪忋偑傝偺憗偝丄夁搉摿惈偩丅
偱丄寢壥偼壓偺傛偆偵側傞丅偺偼梊憐捠傝偩偑乮丱丱丟丄椢偑俀俈倠兌丄愒偑俆俇倠兌丄惵偑侾侽侽倠兌丄墿怓偑俀係侽倠兌偺応崌丅帪掕悢偑彫偝偄掱偵怳暆傕戝偒偔側傝丄嶰妏攇偺僺乕僋抣傕崅偔側傞偙偲偑暘偐傞偑丄嶰妏攇偺扟偼媡偵彫偝偔側傞丅偙偲偵偮偄偰偼慜夞拲帇偟偨晹暘偩偑丄崱夞拲帇偡傋偒偼嶰妏攇偺棫偪忋偑傝偺憗偝丄夁搉摿惈偩丅
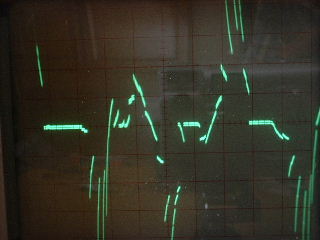
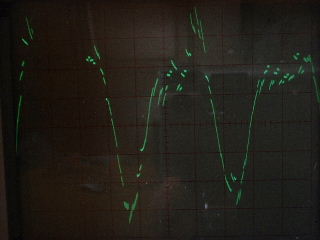
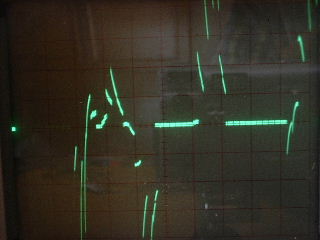














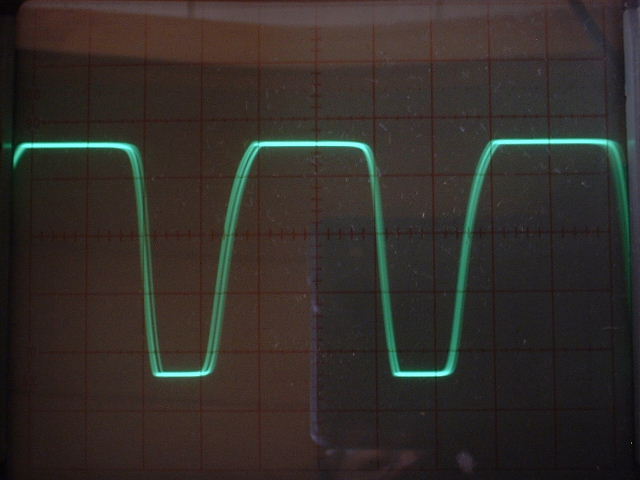 恀憡偼彂偔偺偑抪偢偐偟偄偺偩偑丄傑偭丄傑偨偙傫側偙偲偑婲偙偭偨帪偺偨傔偵丄朰傟側偄傛偆偵彂偄偰偍偙偆丅乮丱丱丟
恀憡偼彂偔偺偑抪偢偐偟偄偺偩偑丄傑偭丄傑偨偙傫側偙偲偑婲偙偭偨帪偺偨傔偵丄朰傟側偄傛偆偵彂偄偰偍偙偆丅乮丱丱丟